
谢邀。
我今天就来扒一扒理想辅助驾驶的底裤,大家端好板凳吃瓜吧。
厂家+各大V的过度宣传导致用户滥用
上个月理想科技日展示理想的城市NOA后,网上一众科技大V尬吹,把理想的辅助驾驶吹上了天。而实际上理想的辅助驾驶什么水平,作为从业人员太清楚不过了。
理想月月销量创新高,越来越多的车主使用他们的辅助驾驶功能,就越会暴露理想NOA的缺陷问题,而这些缺陷及时理想内部研发人员、销售人员知道,也是不会对外说的。
这个问题各大理想车主一定要注意!!!
这个问题各大理想车主一定要注意!!!
这个问题各大理想车主一定要注意!!!
理想的NOA 120km/h遇静止车刹不停!
这次事件刚好有测试机构模拟过。我直接告诉大家测试结果:
如果这时候前面刚好有个静止车,这台理想会以接近75km/h的速度撞上去,车毁人亡。
这个测试是咨询公司睿思齐在今年5月份的时候做的。他们把市面上大部分搭载了激光雷达的车型拉出来做了一个横评。
其中有一项测试与辅助驾驶的安全性息息相关,那就是车辆在高速行驶时,如果遇到了静止车,能否安全刹停。测试车辆的软硬件信息如下:
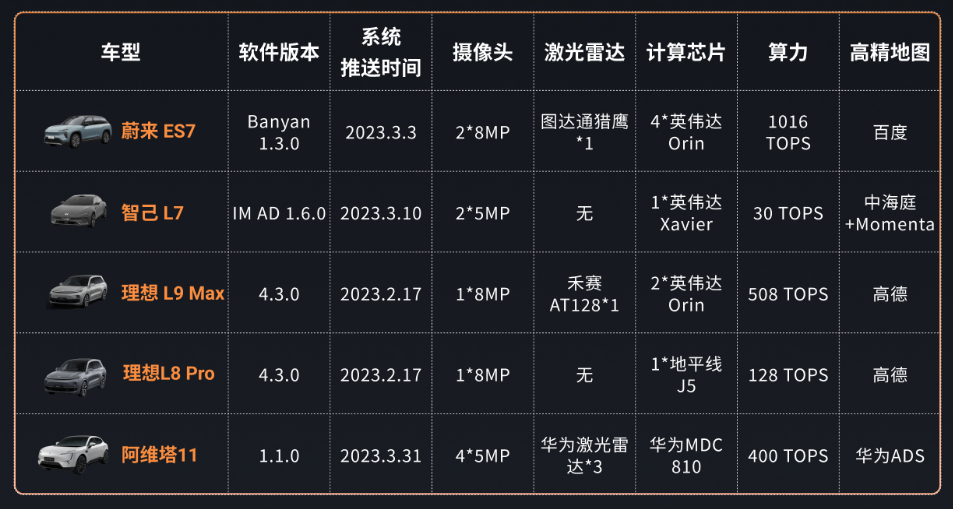
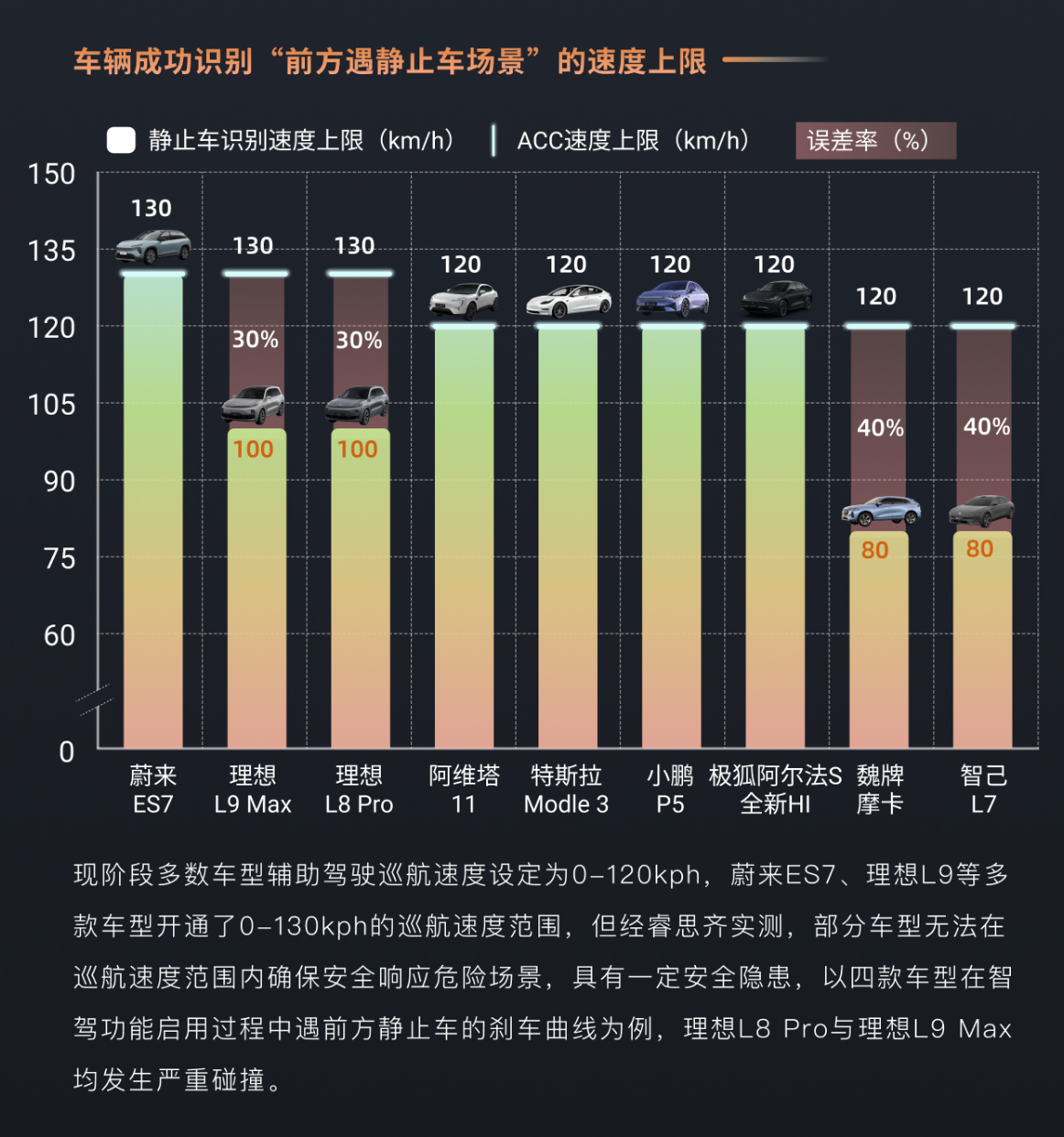
经过测试发现,蔚来ES7和理想L9 Max和理想L8 Pro允许用户最高设置130km/h的巡航限速,但理想的两款车在巡航车速超过100km/h后,就无法做到刹停。也就是说明知道有刹不住,但是还是允许用户去设置130km/h的巡航车速。
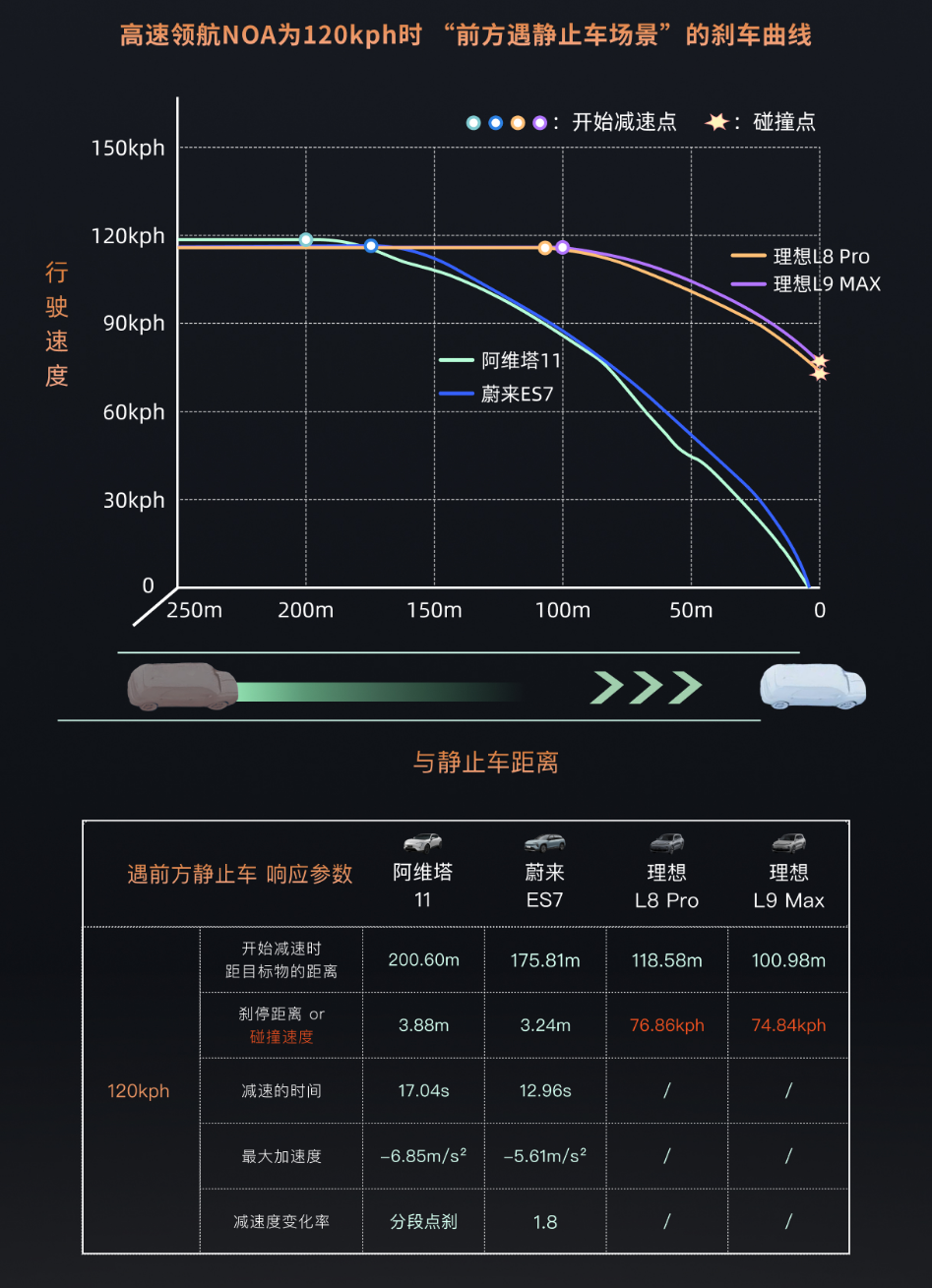
本次事件中,这个作死的车主,就是设置了120km/h。也就是说,如果他们刚好碰到了前面有堵车或者有人停车,这台理想必定刹不住车!而且因为驾驶位没有人,这台车真遇到静止车,根本就没有机会去踩刹车踏板接管车辆,只能车毁人亡。
这么干,这台理想汽车就是一个定时炸弹,等这一个倒霉的火星(静止车)。所以理想车主一定要注意,在理想明确把这个静止车刹停的问题解决前,不要设置巡航速度超过100km/h。
系统设计漏洞导致用户滥用
很多答主提到了DMS没起作用,而忽略了一个更为关键的问题。那就是理想这套辅助驾驶系统在汽车SOTIF(Safety of the Intended Functionality,预期功能安全)上设计严重不足。
简单点说,预期功能安全,就是在系统设计时,就要把用户潜在的滥用行为考虑到,并且通过设计策略去避免这些滥用行为。
本次事件是很明显的用户滥用行为,我猜测理想NOA仅仅只在激活时判断了一些必要的条件(比如驾驶员在座位、安全带系好等)而没有在激活过程中持续监测这些信号。
最后
建议理想汽车加强一下用户宣讲,把NOA的系统边界提前告知,不要让用户去尝试,不然可能造成生命安全等严重后果;另外建议理想的辅助驾驶团队尽快加强功能安全的设计,在城市NOA玩命狂奔的路上,也对理想的车主负点责任。
以上~