
谢邀,刚在地库停完车上来,有一些感想。
先说结论:我同意魏牌所倡导的方向,即未来的智能驾驶更依赖感知,不能过度依赖高精地图。
为什么呢?以我地库停车为例:
①为防止车都堵在入口处,我刚下地库就发现左转、直行停车的路被拉上线不让走,只保留了一个向右的口,大家需要在保安的限流控制下排队鱼贯而入;

②当路过电梯入口时,有孩子来回跑动,稍有分神看不到的话就可能会出事故,因为孩子比较小,距离车近时完全处于盲区之中;
③好不容易找到一个挨着防火门的停车位,发现部分车位被门侵占,而旁边的车停得又比较歪,屁股已经伸到这边的车位里,小心翼翼才把车停好。
其实这是很典型的一个场景,更是普通路面交通的一个缩影。在这个停车场里,停车位的位置、尺寸都是固定的,从入口处到某一停车位的路线也算固定,对于经常进出的业主来讲就相当于在脑子里安装了“高精地图”,夸张一点的话,甚至在肌肉记忆下他们闭着眼都能把车停好。

但在场景发生变化时,地图“数据”就必须要进行更新,否则如果车辆还是按照旧的数据行驶,就会出现问题。
但在现实中,高精地图的更新速度并不是实时的,而且由于涉及到信息安全的问题,还需要进行层层审核,所以高精地图的信息对于车辆来说往往会滞后。而用户在路上行驶时,可是无法承担这种滞后带来的严重后果的。
所以,如果要及时应对场景的变化,仅依靠高精地图是无法应对解决复杂的路面情况的。
换句话说,越是依赖高精地图来实现的智能驾驶就越接近我们学物理时经常碰到的“理想状态/条件下”,而越是重视感知则越接近现实情况、越有实际意义。

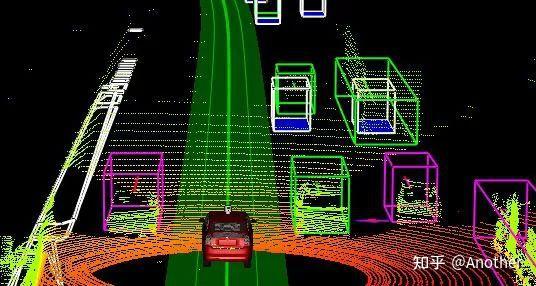
实际上,这个结论在魏牌城市NOH的内测视频中,恰好得到了印证。视频中出现的大量城市道路场景,无论是红绿灯路口的通行、转弯,还是应对加塞和选择车道线,躲避障碍物等等,都是道路的突发情况。这些情况和路面数据,是不可能被地图收录的,必须依靠传感器实时获取,这就体现出“重感知”的重要性和不可替代性了。
当然,并不是说高精地图在未来更高阶的智能驾驶环节中一无是处,只不过相比感知来讲重要性要低一些而已,两者相辅相成才能发挥各自更大作用:只有感知、没有高精地图,就会像无头苍蝇一样乱跑,虽然不会有危险,但始终到达不了目的地,因为没有方向;而没有感知、只有高精地图,就相当于将理想状态套用在现实生活中,肯定要出事儿。

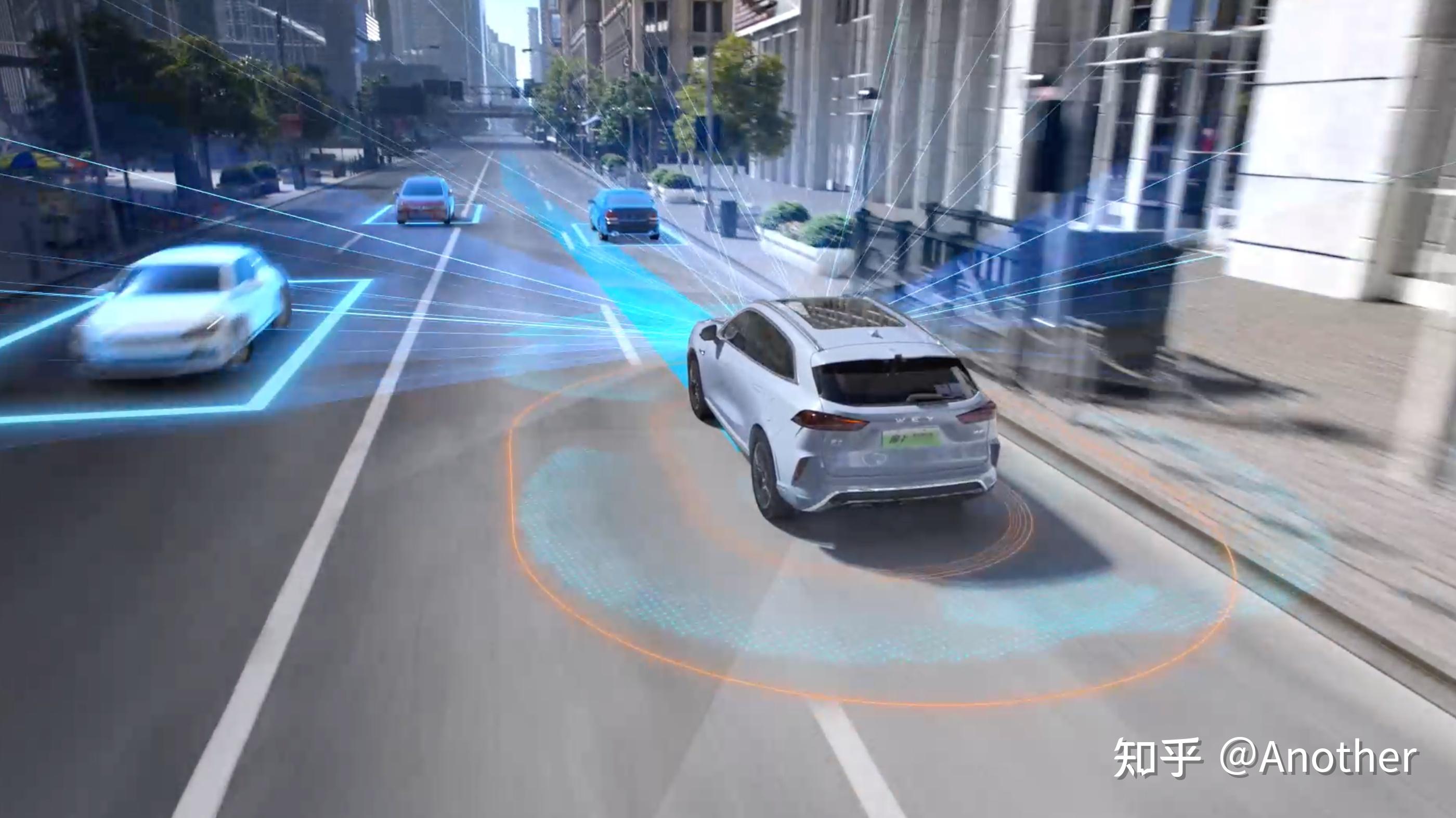
魏牌什么时候提出“重感知”技术路线的我记不清了,不过我很赞同乔老板之前提到的除了“重感知”外,还有个“大算力”。大算力可在“重感知”的基础上提供为其提供正确决策。从魏牌推出的智能辅助驾驶系统也印证了这一点,城市NOH除了应用了多达31个感知组件,搭载HPilot3.0,单板算力360TOPS,还有中国首个自动驾驶数据智能体系MANA加持,多效协同才能使得魏牌摩卡激光雷达版在智能驾驶始终保持性能领先,做到更快、更稳、更安全。
魏牌让我看到了更多自动驾驶实现的可能。相信在魏牌的带领下,也会有越来越多的车企加入到“重感知”的技术路线中,期待自动驾驶真正到来的那一天。