
谢邀。
- 这次魏牌城市NOH内测的视频在微博上就有。
- https://m.weibo.cn/status/4829272386050087?sourceType=weixin&from=10CA295060&wm=9006_2001&featurecode=newtitle&sudaref=login.sina.com.cn#&video
- 从演示看魏牌城市NOH的功能还是非常强大的。在城市复杂路况下,能够自动识别交通标识,应对各种意外情况,顺利到达目的地。
- 其实,在高速公路上的自动驾驶很早就有,不算是特别高难度的技术,但是城市道路就不同了。城市道路的自动驾驶要求要高得多。当年,谷歌无人驾驶汽车项目主管厄姆森说,“在市区里行驶一英里路程要远比在高速公路上更为复杂,因为前者在一个小的区域中会因为规则的不同存在数百种不同的路面情况。我们花了大量时间改进了我们的软件,因此它现在可以实时地区别上百个不同物体——如行人、公共汽车、由协管员手握的停车标志,或者是骑自行车者给出的要通过马路的手势信号等。”由此可见城市道路驾驶的难度之高。

- 而魏牌城市NOH内测视频显示,其在城市复杂路况下已经达到了实用的程度。这在量产车上,之前还只有小鹏P5的NGP能够实现。能将这种水平的城市智能驾驶实现量产销售,魏牌确实业界领先。
- 预计明年量产上市的魏牌城市NOH选择的就是“重感知”的技术方案路线。这个“重感知”的路线是否代表未来趋势呢?我们来分析一下。
- 自动驾驶的几种选择
自动驾驶的历史很悠久了,1973年,沃尔沃已经在车间内使用无人的自动导引车来传送零件,达到封闭场地的自动驾驶。
而真正推动自动驾驶实用是2001年以后,由美国国防部高级研究计划局推动的挑战赛,挑战沙漠、越野和城市道路。在全球各个科技公司,各个大学全力以赴的努力下,最终找到了自动驾驶实现的正确道路。

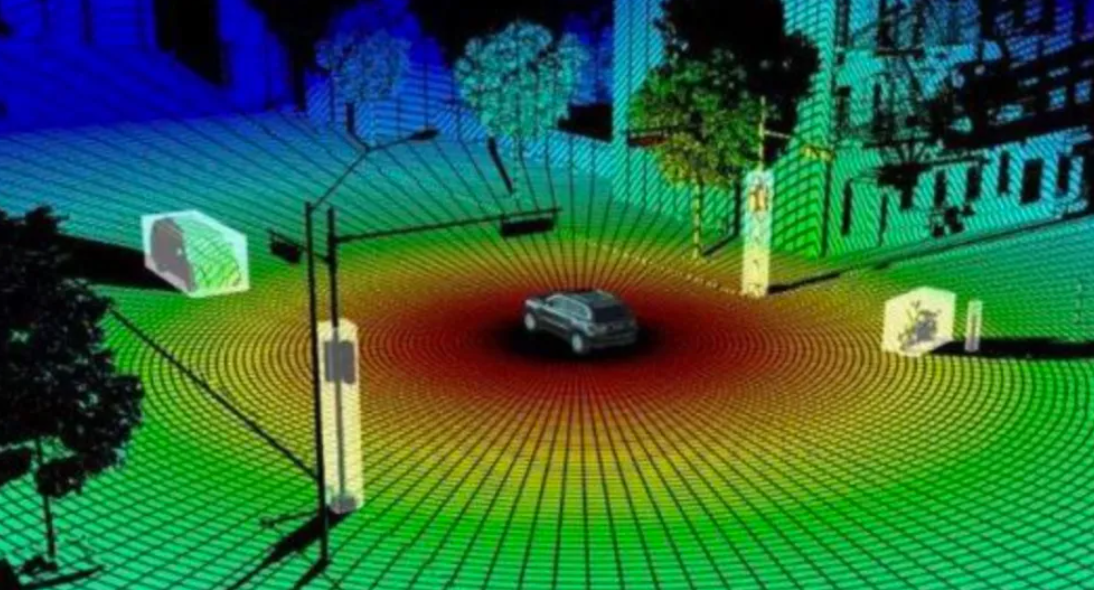
当时,并没有很多外部的资源,不用说高精度3D地图,在测试进行的荒郊野外里,连低精度2D电子地图都没有。最终夺冠的队伍,是斯坦福团队的Stanley用一辆大众途锐改装的,配备5颗Sick单线激光雷达,负责车辆前方25米范围内近距离路面探测;一个彩色摄像头,用于35米范围中远程道路感知;两个24GHZ毫米波雷达,覆盖车辆前方200米区域。GPS信号接收器和一个惯性测量单元(IMU),构成Stanley的定位传感器组,用来估计车辆相对于外部坐标系的位置和速度。6台奔腾M电脑组成计算阵列,一个千兆位以太网交换机以及各种与物理传感器和Touareg执行器接口。
激光雷达、摄像头、毫米波雷达作为传感器,高速计算处理中心计算作出决策,早在2005年就是自动驾驶的标配了。
但是,这个方案的激光雷达价格昂贵,很长一段时间,一台多线激光雷达售价高达百万,难以进入量产车。而有的厂商就比较大胆,在技术可靠性不高的情况下,仅仅用摄像头、毫米波雷达和一些超声波雷达就提供自动驾驶功能,同时就让用户误以为自己购买的车已经有了高级别的自动驾驶功能,结果导致一些严重事故的发生。
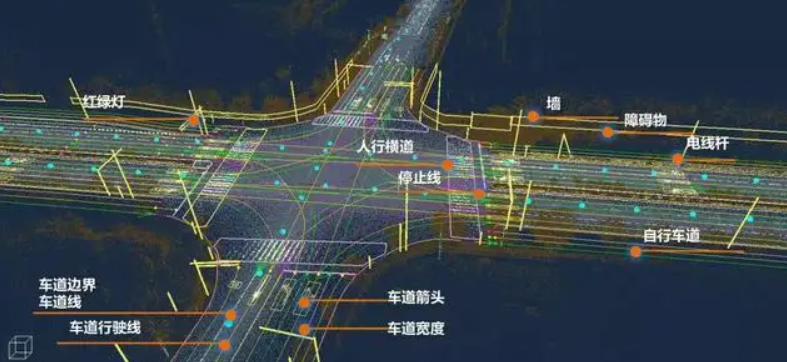
还有一些厂商的自动驾驶技术,高度依赖城市的3D厘米级别高精度地图,这个主要是有百度、高德等有地图资源的厂商在做,后来一些与互联网厂商关系密切的新势力品牌也在做。这个方案在有高精度地图支持的地区还能达到不错的体验,但是一旦到了没有高精度地图的支持地区,不仅体验大降,还有安全隐患。
此外,还有厂商炒作V2X的概念,希望依靠周边信息来提升自动驾驶的水平。
而魏牌城市NOH选择的技术路线是“重感知”的路线,它选择的方案,就是不打折扣的原生态自动驾驶方案。激光雷达、摄像头、毫米波雷达作为主要传感器,高性能计算作为处理单元。把成本用到自动驾驶的传感器和自身算力上面。而把高精度地图和V2X这类东西作为辅助决策。
而且魏牌也不像一些厂商在技术不成熟时就贸然让消费者开不靠谱的自动驾驶汽车。一出手就是技术比较成熟,可靠性比较高的量产车型。这个路线是值得肯定的。
- “重感知”路线好在哪里?
最初,因为激光雷达成本高昂,而新兴厂商又需要自动驾驶的噱头来卖车。于是,就有厂商了走了低成本的“轻感知”路线,仅仅靠摄像头和毫米波雷达识别前方物体。这套方案不用激光雷达,仅仅是摄像头和毫米波雷达来识别前方物体,车身周边用探测距离很近的超声波雷达来感知周边车辆。结果,有一位美国车主遇到了一辆高底盘白色大卡车,白色车身加上背景,摄像头未能正确识别。底盘过高,而超声波雷达探测高度太低,同时超声波雷达探测距离太近,最终一头撞上去,车毁人亡。因为激光雷达价格高昂,用摄像头和毫米波雷达去赌可靠性,结果丢命的是消费者。
高精度3D厘米级别的地图确实非常有利于自动驾驶,因为对道路地形的的识别,对路面交通标识的识别都可以通过地图来辅助,可以大幅度降低采集和计算的数据量。但是出于国家安全考虑,国内并不是所有地点都允许一家汽车厂商掌握高精度地图。最早搞地图导航的高德、百度都遇到过这个问题,后来拿到资质的汽车厂商更是头疼。这个东西适合作为辅助,不适合依赖,一旦依赖就会出现体验的过山车和安全隐患。因为不能保证用户只在有高精度地图的地方开车。所以这个路线也有局限。
至于V2X属于未来计划,它要要对城市进行改造,还要汽车厂商配合,只有各方面配合好了,才有足够的信息可用,才有网络传输,这个都是未来式,没有强大的统一规划和足够的利益,理想只是理想,依赖这个东西比高精度地图更不靠谱。
所以,魏牌的“重感知”路线更符合消费者利益。魏牌的态度是技术不成熟不用,一直等到激光雷达产业链逐渐成熟,成本足够低。再到业界提供了高算力,有软硬件成熟的AI解决方案,最后到自己把可靠性验证没有问题以后再搞。所以,魏牌一出自动驾驶就是上市销售的量产车型,直接让消费者感知到自动驾驶的魅力。

“重感知”路线的优势在于,自动驾驶能力首先依靠车辆自身的多种传感器配合和强大计算能力,外来信息仅仅是锦上添花的作用,这就可以在任何地点,任何环境下正常工作。这更符合中国道路的现实情况。而且这个路线未来可以随着外部条件的改善而不断升级,更有前途。
- 魏牌是如何做到“重感知”的
从2005年开始,这一轮自动驾驶革命的开始,就是激光雷达传感器的应用。所有L4级别的试验车型,都是以激光雷达传感器为基础的。激光雷达传感器才能避免摄像头视觉识别算法的局限,全面立体的远距离感知周边环境。

所以,魏牌的城市智能驾驶方案使用了两颗激光雷达来感知,避免了视觉识别错误的问题。
在视觉感知上,魏牌摩卡激光雷达版提供了12颗摄像头,包含4颗百万级像素环视摄像头,4颗百万级像素侧视摄像头,4颗800万像素感知摄像头,这样就有足够的影像资料让AI去识别判断,与激光雷达共同感知周边情况。而一些低配自动驾驶的视觉方案,只有前面的两个摄像头。多摄像头多视频流与激光雷达配合,才能更准确的感知周边环境,作出正确决策。
除了激光雷达和摄像头,魏牌还提供了5颗毫米波雷达来做中远程的物体探测,不留死角。毫米波雷达探测距离远,是很好的补充。但是数量太少,很容易出现探测盲区。当年,某品牌车毁人亡,就是因为只有一个位置较低的毫米波雷达,直接从大卡车底盘下穿过,没有探测到卡车,同时摄像头再识别错误,这才一头撞上去。魏牌摩卡激光雷达版配备5颗毫米波雷达,可以实现360度全覆盖无盲区。

这么多的信息要处理,没有强大的芯片是不行的。早期自动驾驶比赛的时候,仅仅处理激光雷达的信息,就要把好几台电脑装到车上。现在随着科技的进步,特别是AI芯片的发展,处理器的算力已经非常强大。魏牌摩卡激光雷达版使用了高通骁龙 Ride 平台下的5nm和7nm的芯片组合,单板算力达到 360TOPS,四板叠加可以做到1440TOPS。而且这个平台支持多路激光雷达,摄像头,毫米波雷达,支持各种信号的联合计算和AI训练,可以很好地处理多路采集的信号。
所以,我们才能在路测视频中看到魏牌城市NOH在复杂城市路况下也有很好的表现。测试中穿过保定市区繁华街道,从保定市七一东路出发,途经东三环、复兴路、恒祥大街与七一中路,全长17公里,行驶40分钟,途经31个红绿灯,对诸如红绿灯识别、车道线识别、行人识别等常见城市场景的处理能力都没有问题,实现全程0接管。
未来,魏牌城市NOH“重感知”的路线走通后可以不断升级。激光雷达可以探测得更远,更精确。摄像头可以有更高的分辨能力,芯片的算力随着半导体工艺进步不断提升。AI训练越来越成熟,“重感知”的路线,自动驾驶能力会越来越强。高精度地图、V2X的辅助,也会起到锦上添花的作用。

我们大约明年很快就会在市场上看到摩卡DHT-PHEV激光雷达版,到时候大家去4S店试一下就可以感知到城市NOH技术的魅力了。