
对于智能驾驶来说是不是最终选择,目前还不能下定论,原因是如大家所知,智能驾驶的路其实还很长,还有很多corner case,很多问题需要去解决。
但从目前趋势来看,“重感知”的优势越来越受到大家的重视,越来越多玩家尝试将其推到量产,魏牌城市NOH就是其中最早的一批。
为啥过去大家没有太多提“重感知”这个路线呢?
这是随着行业的发展而逐渐变化的,经历了不同的阶段。
“低阶智能驾驶”解决的是有无的问题,工况比较简单,并不需要考虑太多
过去,甚至到当下,国内大部分的智能驾驶功能都是低阶的辅助驾驶系统,大多数是L1/L2的水平。根据艾瑞咨询的数据,当今年,大多数车搭载的都是L2以下,L2+往上的能量产的,少之又少。

对于只需要简单实现一些ACC、LCC的这些低阶的智驾功能,对感知能力的要求、对地图的要求也都不高,因此也并没有谁轻谁重的说法。
“高阶智能驾驶”解决体验好坏的问题,需要更多的资源
随着大家对智能驾驶有了更高的需求和探索,逐渐往更高阶的方向发展,就会进入到一个更复杂的之前没有人踏入的领域。也因此诞生了好几个方向的尝试,例如特斯拉的纯视觉方案,以及目前比较主流的融合感知方案。
大家最熟知的特斯拉,是一个剑走偏锋的路线——非常强调视觉感知
特斯拉非常倚重摄像头的视觉感知,依托不断进化的芯片硬件,以及不断累积的数据的深度学习。特斯拉依靠这种在硬件迭代和海量数据量的优势,在智能驾驶中独树一帜。
融合感知路线——目前主流车企所选择的一条路
国内新势力大多数是崛起于特斯拉已经建立了一定的先发优势的时期,同时特斯拉的智驾方案更适合于国外地广人稀的场景。而国内路况复杂,因此国内的大多数玩家一开始都投入到了高精度地图的这一大杀器上。
高精度地图的加入,能大大降低系统的复杂度,同时在早期算力、算法、硬件并没有很成熟的时候,也能在短期内做出领先一步而又适用于中国环境的效果。
融合感知路线下:小鹏是重地图;魏牌则是重感知(重感知的部分会在后文展开说)。以小鹏NGP的智能架构为例,在传感器上同样是使用了毫米波雷达、摄像头,同时也加入了高精度卫星定位、高精度惯性导航以及高精度地图。与普通导航地图相比,高精地图精度达到了厘米级,除了包括普通地图所有的元素之外,还会包含路灯、护栏、红绿灯等几十个甚至上百个要素的信息。因此小鹏在引入了高精度地图之后,在原来比较轻量的L2及以下的ADAS功能上,可以做出一些差异化的功能,如自动驶入驶出匝道、自动变道等。
为什么大家现在又开始谈论“重感知”了?
“重地图“的这一做法,某种程度上可以说是“成也萧何,败也萧何”。
除去在信息安全,政策监管这一方面的因素,高精地图还有比较大的难题,那就是门槛高、更新频率要求高。
面临更为丰富的车道、复杂的路口信息,高精地图的采集需要极高的技术门槛和成本。同时,随着智能驾驶往L3及以上的更高阶发展,对高精地图的更新频率的要求就更高了,这是比较难解决的问题。
在这样的背景下,大家都开始投向了“重感知”的路线。尤其是现在AI芯片的算力越来高也越来越便宜,更多的智能传感器越来越成熟,大家也看到了逐渐尝试并量产的“重感知”的路线。
比如,8月底成都车展发布的魏牌摩卡DHT-PHEV激光雷达版就是此类代表,它搭载了“重感知”的城市NOH功能,宣告正式入局城市级智能辅助驾驶。甚至小鹏也在今年的10月24日科技日也透露出第二代XNGP上逐步转变为“重感知”路线,并预计于2023年上半年上车。
“重感知”与特斯拉的相比又有什么新的不同?
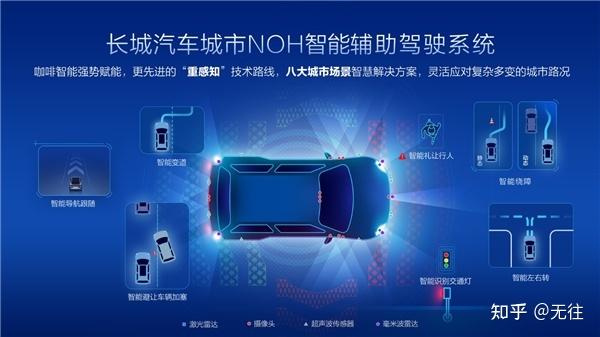
以发布信息最多的魏牌城市NOH为例,我觉得它与特斯拉最大的不同体现在硬件配置、算力、体验方面。
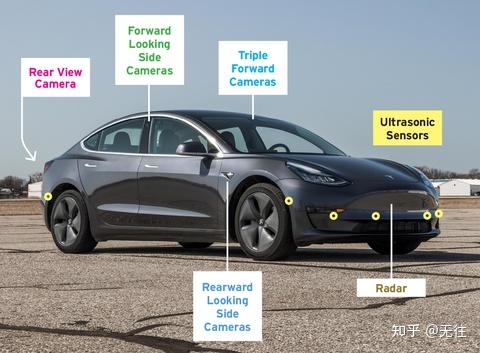
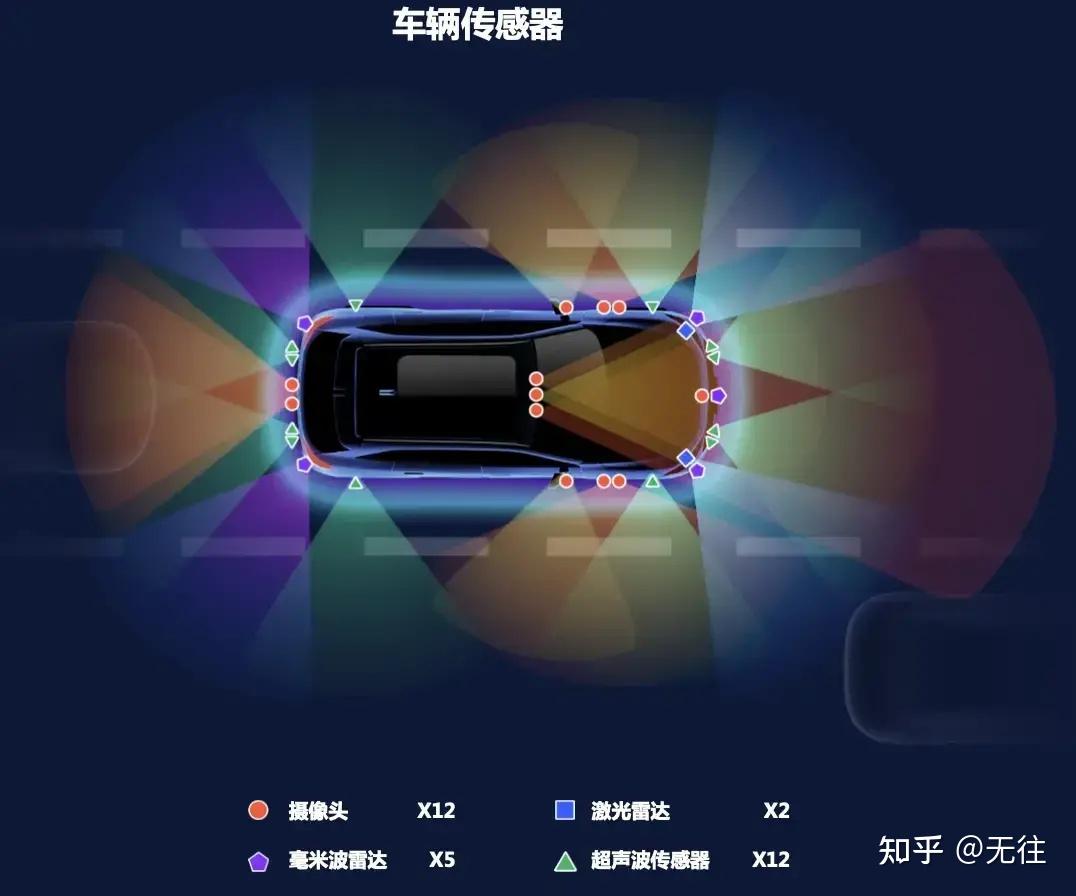
在硬件配置上,与特斯拉不同,魏牌城市NOH搭载了更多目前行业内领先的高性能感知硬件,有更强大的激光雷达的加入,形成激光雷达+毫米波雷达+超声波雷达+摄像头的超强感知模组的组合,数量上也达到了31个,比很多主流的辅助驾驶车型的要多。这样强大的传感器组合可以提供更强大的感知能力,可以支持更多更高级更智能的智驾功能。
这样四位一体高效协同的超强感知模组,配置覆盖角度更高,对于近处低矮障碍物的感知、防碰撞的效果更佳,同时170度FOV的覆盖也给城市NOH提供更多的功能支持,例如近距离切入,前向障碍物横穿等场景。不过度依赖高精地图,更能适应中国城市复杂多变的路况,安全冗余度更高。为户用提供更安全、可靠的智能驾驶体验。
在算力上,特斯拉采用的是14nm工艺72 TOPS AI算力的FSD芯片,魏牌城市NOH则搭载高通Snapdragon Ride平台下首发5nm高通骁龙8540+7nm高通骁龙9000方案,算力达到360 TOPS,并且后续可以升级到1440 TOPS,是目前全球算力最高的可量产自动驾驶计算平台之一。

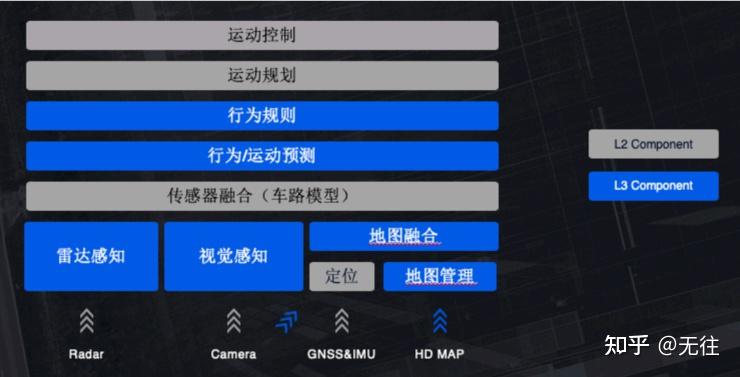
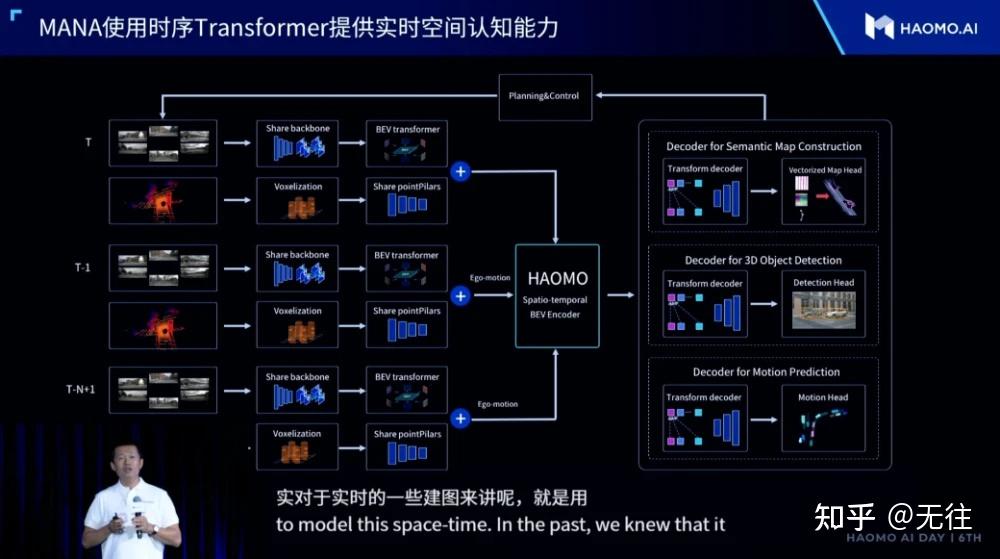
在算法方面,区别于传统的基于循环神经网络RNN架构的序列算法,魏牌城市NOH搭载的是MANA自动驾驶数据智能体系,引入了Transformer模型,在底层融合视觉和激光雷达数据。这样既可以解决多相机之间的融合关联,又通过激光雷达有效提升了视觉检测的效果,实现空间、时间、传感器三位一体的深层次感知,解决了过去在城市路上遇到模糊标线的难题,让驾驶更安全可靠。
在国外相对简单的路况,纯视觉感知的方案达到了成本与体验的均衡,但当面对国内的复杂路况,这种方案就显得不够用了。在复杂交通环境下的体验差异,是“重感知”路线与特斯拉的最大区别。魏牌城市NOH不单依赖摄像头为主的视觉体系,还采用更先进的激光雷达+摄像头+毫米波雷达的感知体系,实现视觉体系与感知体系双重保障,这是一条更加冗余,更加注重安全的可靠路线。
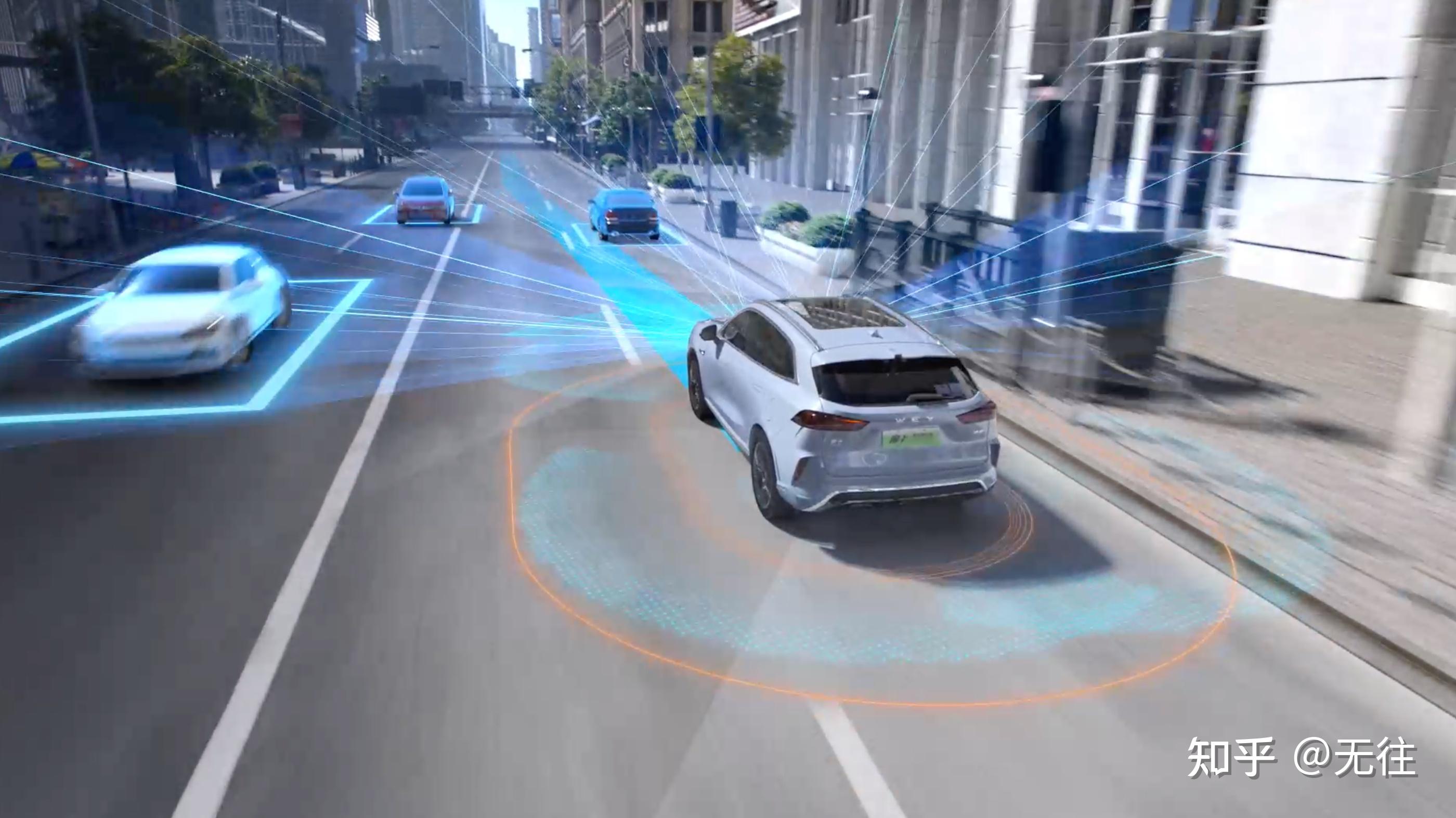
从魏牌发布的内测视频上看,得益于在传感器配置、算力上的高配置以及自动驾驶数据智能体系加持,魏牌城市NOH可以做出更符合中国环境的体验。比如智能导航跟随、交通灯识别、城市路口通行、智能绕障、行人礼让、锥桶识别、车道加塞避让、城市智能变道等非常复杂的八大主要城市场景,魏牌城市NOH都能灵活应对。
魏牌城市NOH是目前中国城市场景覆盖率最高的城市辅助驾驶系统,不仅包含了中国城市道路的通勤场景,还包括城市开放道路、城市快速路、高速路等通勤道路。更重要的是,在安全冗余方面也下了很多功夫:遇到极端车流或者突发意外情况导致NOH无法应对的状况时,会提前给驾驶员提示。遇到无法避免的交通事故时,车辆会优先保证自身安全,然后进行其他策略调整,同时也会提醒用户进行接管,充分保证车主的行车安全。
从魏牌城市NOH公开的内测视频看,在保定全长17公里的道路中,行驶了40分钟,途经31个红绿灯,实现全程0接管。在很多中国环境的路况都能轻松应对,比如像加塞切入避让这些很复杂的场景,表现得像熟练老司机一般。而且视频中NOH会根据目标速度、路径等综合信息来判断该如何操作,不会猛然刹停,保证安全的前提下兼顾通行效率和舒适性。
“重感知”是不是智能驾驶第一梯队的最终选择?
从目前来看,行业趋势似乎很明显:
特斯拉的倚仗视觉的路线可能在中国环境行不通,无法提供符合中国环境的体验
过去像小鹏NGP等“重地图、轻感知“的路线,在往体验要求更高、更高阶的智能驾驶发展时,高精地图的更新频率、地图鲜度、政策监管等制约越来越明显,问题难度越来越大,成本越来越高
因此,“重感知”可能是当下最满足中国环境的辅助驾驶路线的方案,越来越多的玩家选择这条道路。比如,魏牌城市NOH是在中国覆盖城市最多的城市辅助驾驶系统,2022年底前将实现超过10座城市覆盖,未来也会突破100座城市;小鹏XNGP2023年也有开始铺量的计划。
这意味着,“重感知”是技术实力最强、实用性和落地性最快的方向。同时也意味着会有更多的用户能够更快体验到更好的智能驾驶辅助功能。