
技术要服务于人才有意义,“重感知”技术路线的价值体现,也必须遵循这个逻辑。
从技术难度角度看,关于智能驾驶体验,随着高速公路智能辅助驾驶以及特定环境下的智能辅助驾驶(比如智能泊车)逐步普及,城市智能辅助驾驶是未来的重要攻坚领域。
从使用频率角度看,现在大部分人的生活圈是在城市内,智能驾驶辅助如果不能提供高质量服务体验,可能会稍显鸡肋。
从车企竞争力角度看,随着汽车市场在电动领域的渗透率逐步到30%以上,中国企业扎堆推出30万以上的车型,如何体现车型的高智能服务体验,城市智能辅助驾驶是一个非常重要的竞争要点。
讨论“重感知”技术路线是不是智能驾驶的最终选择,我们很有必要先看看它的实现难点在哪里,不同技术路线的区别是什么,以及这一技术是否能够为用户带来价值。
因为,有实现价值和实用价值的技术路线,才有可能成为车企的最终选择。
一、城市智能辅助驾驶攻关难
虽然各大车企都知道城市智能辅助驾驶很重要,但实际上将其城市智能驾驶功能量产落地真是寥寥无几,截止目前仅有3-4家,说明这真的是“知易行难”。
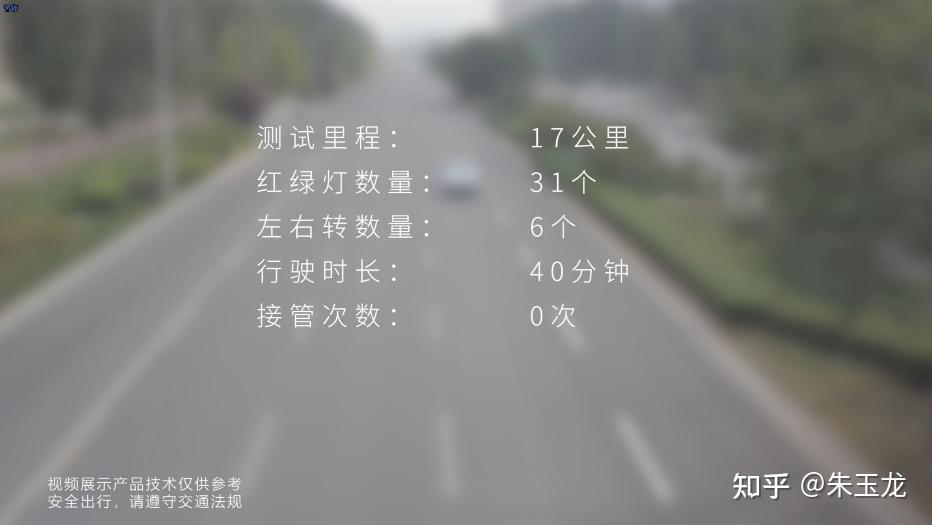
但令人惊喜的是,最近魏牌也公布了自己的城市NOH功能内测视频,在这段放出的视频中,可以看到搭载城市NOH功能的摩卡DHT-PHEV激光雷达版已经可以在0接管的情况下顺利行驶,顺利完成保定市区长度达到17公里的城市道路。途中经过了31个红绿灯,有6次十字路口的左右转弯。摩卡激光雷达版保持适中的速度,以比较流畅的节奏顺利完成了整段测试,魏牌城市NOH的精彩表现给观众留下了深刻的印象,很好地体现了技术服务于人的理念。
但尽管都是城市智能辅助驾驶,此技术与彼技术还是有区别的。比如,魏牌和新势力品牌XP虽然都采用的融合感知的技术,但是两者就各有侧重点,魏牌更加偏重感知,而XP则偏重于高精地图。那么不同的技术路线会给城市辅助智能驾驶带来哪些影响呢?
二、为什么“重感知”路线受到青睐?
先来看看不同的技术路线各有什么特点。
从全球范围来看,从高速智能驾驶辅助往城市智能驾驶辅助发展,美国的T品牌是国外率先采用摄像头视觉为主的新能源车企,是“感知”路线的先行者。
与重感知相对的,则是强调“预先采集信息”的高精度地图方案。但是现实来看,不依赖高精地图,使用标精地图则是有两个好处:a、可避开高精地图带来的政策审批局限性,使得方案能快速落地更多的城市;b、减少高精地图带来的成本和以后固定时间的更新维护。并且随着激光雷达开始使用后,汽车的高精度感知能力大幅提升,为“感知”路线注入了一支强心剂。
2022年很多企业都开始尝试围绕感知来构建技术。除了新势力汽车之外,在智能驾驶方面投入大量资源的企业也包含了魏牌。摩卡DHT-PHEV激光雷达版是魏牌首款搭载城市NOH系统的车型,与XP和T品牌相比,魏牌的不同之处在于,既不走“纯视觉”路线,也不过分依赖高精地图。

魏牌的“重感知”路线,是在感知系统上配备2颗125线激光雷达,5颗毫米波雷达,12颗超声波雷达,12颗高清摄像头,集成激光雷达+毫米波雷达+超声波雷达+摄像头,31个感知组件,四位一体高效协同的超强感知模组。
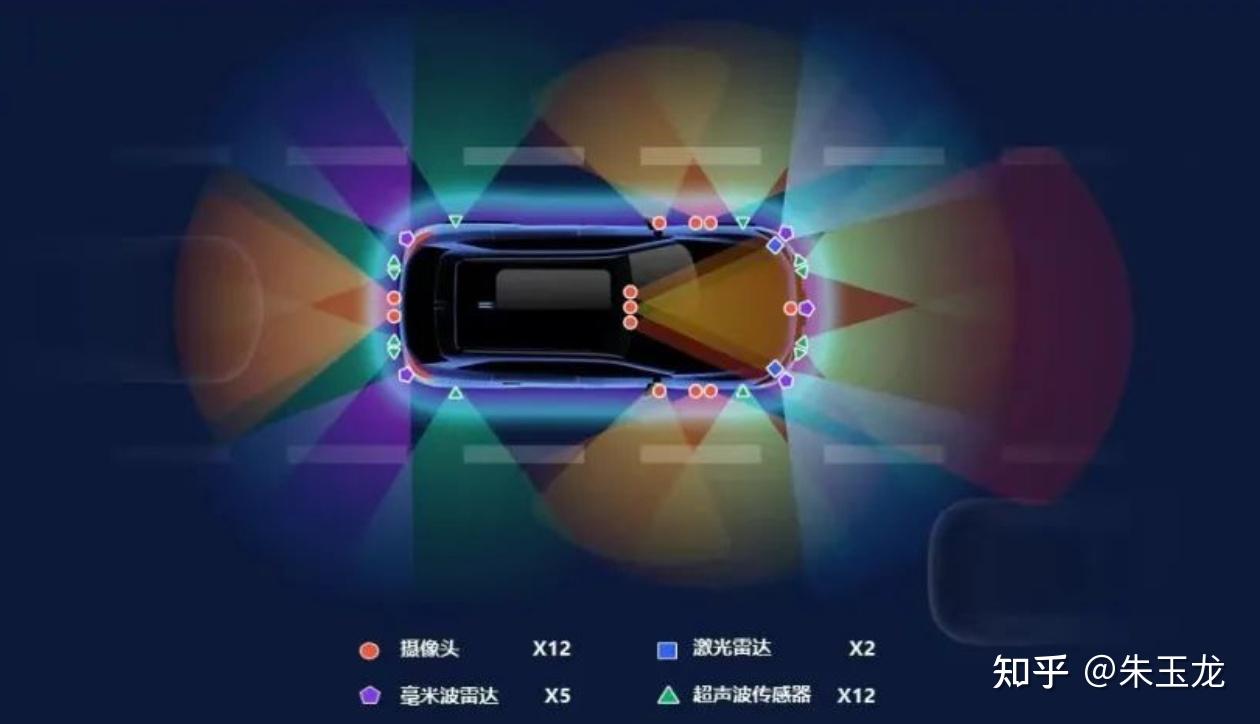
这台车最有辨识度的是车头两侧的两颗固态激光雷达,来自速腾聚创,波长905nm、视场角120°*25°;角分辨率非均匀,水平和垂直均为平均0.2度,等效于125线。
既然是“重感知”,能够承载算法的算力规模就十分重要,支撑魏牌智能驾驶平台的,是HPilot3.0高通骁龙 Ride 平台,算力360TOPS,搭配 144MB 的高速缓存,计算能力达到了 200K+ DMIPS,而通过这个高算力的平台,也是能把感知的配置和效果发挥到极致。
在硬件配置和算力算法的加持下,“重感知”路线体现出很多优势。比如,在信息采集能力上比“纯视觉”方案更加可靠,不同种类的传感器可以分别获取不同距离、位置、尺寸和特点的障碍物情况,可以更加全面感知路面信息;而高算力可以实时对庞大的视频数据量进行演算,进而指导车辆做出最快速的判断。而这些信息和判断都是基于实际获取的信息,而非地图上预先存储的信息,因此会更加准确、及时,应对能力更强,最大化保证城市智能辅助驾驶的安全和可靠。
实际上,正是因为“重感知”路线体现出了诸多优势,所以即便以前对高精地图非常重视的新势力XP品牌,在技术路线上也开始有所转变。
三、魏牌城市NOH内测结果展示了哪些价值点
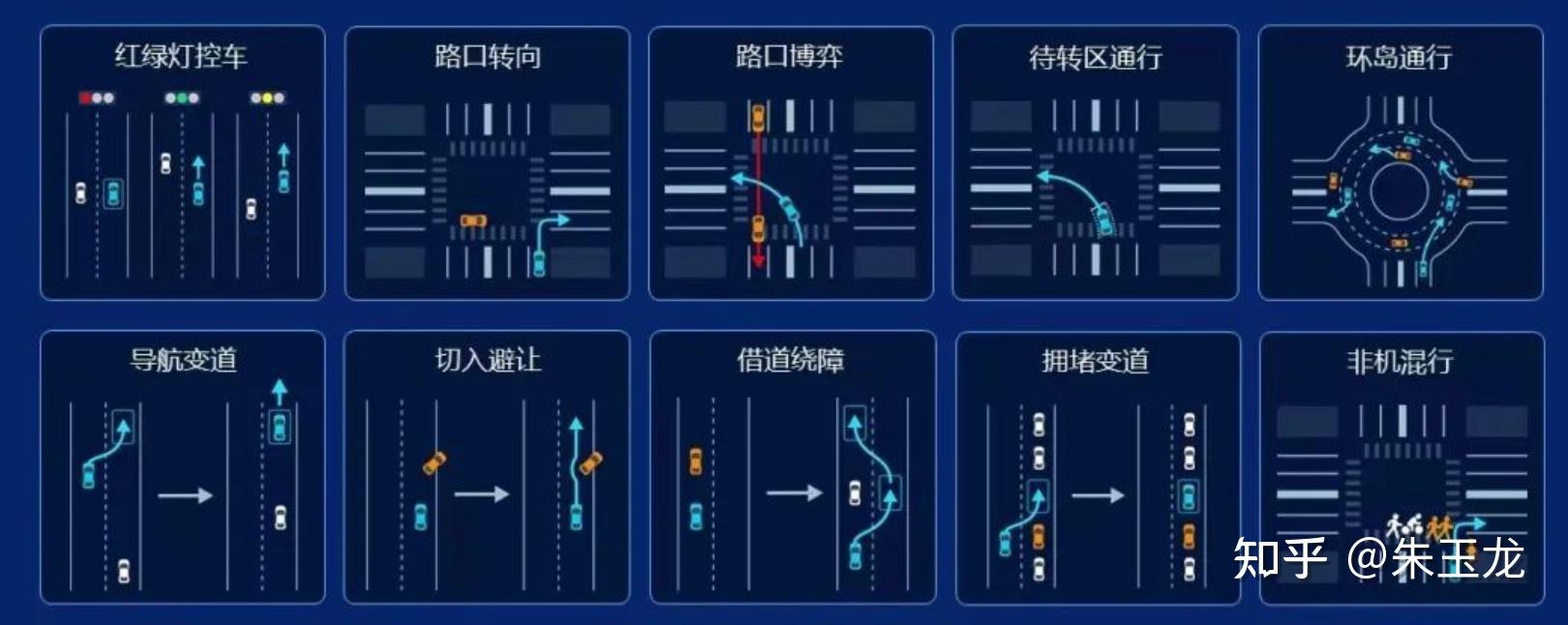
再回过头来看看魏牌城市NOH内测的情况,在保定市区早高峰路况下,摩卡激光雷达版的城市NOH功能在红绿灯识别与控车、路口通行、切入避让、智能绕障等消费者最为常用的城市核心场景下仍然有着优秀的表现。
在这个过程中,我们可以获得以下价值点。
(1)人相比机器很大的不同在于触类旁通能力。
比如对不同的红路灯显示方式识别,又或者在能见度稍差或者有大车遮挡的情况下,对“残缺内容”的理解能力。
(2)没有明确车道线下的安全工作
城市道路的车道线并不是完美的,没有明确道路线的情况经常存在。别说机器了,就是驾驶员在这种路段,也会打起精神。
魏牌采用的是自研 BEV Transfomer 用于车道线识别。从“重感知”路线的发展来看,我们可以把SLAM算法(也就是单一摄像头的时间序列)+深度学习作为感知路线1.0时代。基于激光雷达、多摄像头+多传感器的BEV(Birds-Eye-View)模型则是感知路线2.0时代。
从这次魏牌内测视频来看,车辆可以稳定通过各种交叉路口,并且会在显示屏上提示道路信息和行驶意图,并不需要驾驶员接管操作。

(3)交通流处理能力
关于交通流处理很是重要,从个人角度说,这是避免交通事故,快速达到目的地的重要能力。从城市道路运营管理者角度看,这是避免堵车的重要能力。
关于幽灵堵车大家可能听得不多,但肯定不陌生。其实幽灵堵车经常发生,比如前方强行加塞、无缘无故踩急刹车;前方车辆没有按照交通规则行车,在绿灯的时候就停车了,无形中降低了红绿灯通行率等等。
对于交通流的处理能力,一个是要做到预判,并在适当时候,能准确地选择变道或者超车。而不是自己做好自己,我慢但是不做错就有理。
总之,据资料显示,魏牌城市NOH系统可以达到路口通过率 70%,变道成功率 90%,交通流处理能力 4 级。也就是说这套系统,可根据导航提供的行驶路线,在城市环境中实现自动变道超车、红绿灯识别与控车、复杂路口通行、无保护左右转等主要功能, 同时也可应对车辆近距离切入、阻塞占道、交叉路口、隧道、立交桥等复杂的城市交通场景。对于切实解决城市交通智能驾驶辅助的难题,帮助用户更好应对市区驾驶可以起到良好的作用。
小结:
整体来看,“重感知”技术路线在实现上确实具有一定的优势,而且从测试结果来看,其表现也令人眼前一亮,能够让用户体验到新技术带来的体验改变。所以,作为城市智能驾驶辅助的技术手段,“重感知”路线肯定是未来的一支重要力量,魏牌本次测试直观展现了他们的测试效果。
希望以后有机会能做亲身试驾,到时候我会做一个更详细的体验总结。