
中国首批量产城市智能辅助驾驶系统
想到城市智能辅助驾驶系统,我觉得大家第一个想到的应该是小鹏汽车,我也算是比较早期体验过NGP的用户,2021年的时候体验了高速NGP,今年体验了城市NGP。小鹏P5的城市NGP功能在广州那种复杂的路况下,让第一次接触城市智能辅助的我感觉有些惊喜。除小鹏之外,近期魏牌发布的一段摩卡激光雷达版所搭载的城市NOH内测视频,引起了我的关注。

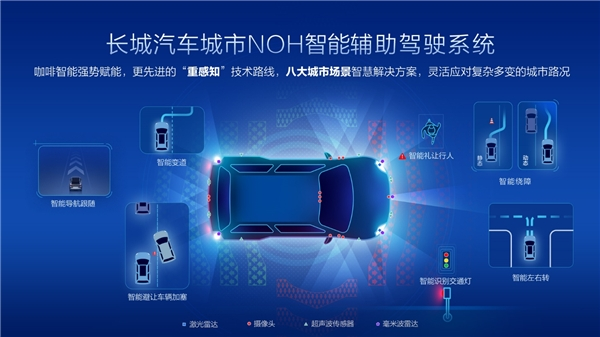
这段由魏牌副总经理乔心昱和毫末智行甄龙豹驾驶摩卡激光雷达版体验城市NOH的视频,展示了城市NOH对多种复杂城市道路场景的处理,包括十字路口转弯,红绿灯识别,应对加塞车辆,躲避障碍物,自动选择车道等等,整体表现非常惊艳。
那么大家不禁要问了,魏牌的城市智能辅助驾驶路线NOH和小鹏城市智能辅助驾驶路线NGP还有最早的先行者特斯拉FSD,到底谁更胜一筹呢?
特斯拉FSD,小鹏NGP路线和魏牌城市NOH路线在技术路线上的差异
特斯拉的FSD把自动驾驶这个话题点燃,在2019年之前,特斯拉FSD在智能驾驶上,基本是一枝独秀的状态,它引领了一个全新的模式:纯视觉路线。当时在知乎引发疯狂讨论:国内主机厂是应该学习特斯拉还是应该多增加点传感器(激光雷达)再融合视觉?而今年特斯拉爆出的信息是将100%依靠视觉摄像头完成智能驾驶。当然,视觉的风险一直都在,毕竟大雾大雨还有隧道,人眼都不好使了,特斯拉也会提示摄像头观察受限的警告,所以特斯拉虽然目前是全视觉方案,但是我们可以大胆猜测,他们也会走上摄像头和雷达融合的道路。

小鹏的NGP发展先以高速为突破口,今年10月又公布了以P5为基础平台的城市NGP实测视频。需要注意的是小鹏城市NGP方案中,还有一个非常重要的软件系统,这就是高德提供的高精度地图,这种精确到20厘米级的地图通过“高精度+高动态+多维度”数据,为自动驾驶系统提供更准确的位置、路径规划和路况信息。但是也带来另一层不可确定性——地图资源需要成本去采集和建模,同时因为高精地图相比普通的导航地图来说,包含的道路数据更多,比如道路指示牌、坡度、曲率等与国家安全息息相关的敏感数据都囊括其中。这也意味着,采集信息的专业程度、数据安全等都有要求。
小鹏城市NGP首批城市是广州,也是因为小鹏只搞定了广州的高精度地图,小鹏要想每个城市逐一去攻克,这个时间上不等人,可能每个城市都要花上很半年左右的时间,而且不确定性很大。
小鹏的路线中,过度依赖高精度地图成为其难以快速落地的根本原因。

为避免过度依赖高精地图,魏牌则选择了“重感知”的第三种路线。但这也无疑加大了感知和决策的难度,也就意味着对于感知、算法的要求更强。为了解决这部分难题,在硬件上,摩卡DHT-PHEV激光雷达版将两颗速腾聚创的125线半固态激光雷达装载到车的前脸两侧。配合5颗毫米波雷达、12颗超声波雷达、12颗高清摄像头,共有31个感知组件,其激光雷达布置在车辆的雾灯区,对于近处低矮障碍物的感知、防碰撞的效果也更佳。魏牌城市NOH不过度依赖高精地图,不受地图审核限制,因此也能够更快在更多城市落地, 2022年底前魏牌将实现城市NOH超10座城市的覆盖,明年将突破超过100座城市落地应用。这大概就是地图不受制于人的好处。

魏牌城市NOH的“重感知”技术路线更能适应中国城市复杂多变的路况,为户用提供更安全可靠的智能驾驶体验。其“重感知”后必然有大算力的支持,魏牌摩卡DHT-PHEV激光雷达版全球首搭高通骁龙单板算力达360Tops的大算力芯片,并在中国首个自动数据智能体系MANA的加持下,让魏牌城市NOH智能辅助驾驶系统可以持续进化,像人一样感知、思考和决策。实际上,不依赖地图的高阶智能驾驶辅助才是更像人类的方式,如同我们去了外地陌生城市开车也一样能把车开好,其原因在于我们人类司机拥有强大的大脑,可以运用成熟驾驶经验来处理新的问题。

魏牌摩卡激光雷达版路测功能感受
先说结论:单纯看两个势力的演示样片,我认为魏牌和小鹏二者的城市智能驾驶是处于同一水平的。这次魏牌城市NOH功能测试是一镜到底的形式记录的,整个测试过程中魏牌城市NOH做到了0接管,而我上次在广州体验小鹏NGP的时候,司机是有一次接管的。除了路线上小鹏和魏牌有所区别外,他们在策略选择上也各有不同。
展开的说就是,小鹏的决策有时更像老司机点,开车不太想怂,所以比较激进;而魏牌相对保守,但是更加可靠、安全。相对于小鹏而言,魏牌城市NOH是中国首个专注于感知路线的城市辅助驾驶解决方案,主要通过计算机视觉,而不是过度依赖属性更多、精度更高的高精度地图,虽然单车硬件成本会更高。但是从一个城市到100个城市更容易,这保证了技术解决方案的可扩展性,从落地的速度上,反而有可能后发先至。
随便举两个案例。比如下面这个场景中,在车道从3变2的过程,魏牌摩卡激光雷达版选择最保守的原地等待,等其他车辆超越后,自己再前进。如果只考虑这个场景,也许你会觉得反而造成交通拥堵,但这是在其他车辆是人为驾驶的情况下造成的。如果未来某一天,所有车都配备了智能驾驶辅助系统,那么在大家都采用这一策略的情况下,反而会让通行效率提高。

再看这个场景,比如碰到车道上右侧有车辆抢行,同时还侵占摩卡的车道线的时候,摩卡选择降速跟随,等拉开安全车距之后,再加速跟随,显然也是一个让交通参与者更安全的处理方式。

尽管保定的路面车辆可能不如北上广等大城市多,但是各种突发情况会比较复杂,一些不守规矩的路上行为也有不少。所以,城市NOH能对这些情况正确处理,那么我们也有理由相信它在其他城市的场景中也有类似的处理能力。
事实上,就在前几天,部分媒体亲身驾驶摩卡激光雷达版,在北京市区体验了城市NOH功能。试驾路线在北京回龙观地区,总长度达到20km左右,也算是北京路况相对比较复杂的道路。车辆在智能变道、智能左右转弯、红绿灯识别、智能躲避静态及动态障碍物等方面的表现得到试驾媒体的一致好评。再次充分说明魏牌“重感知”技术路线的可行与可靠。
魏牌/小鹏这些城市智能驾驶的使用场景能带来怎样的感受
作为体验过城市智能辅助驾驶的老司机,我深刻认为,高速驾驶辅助其实对于老百姓的收益并没有想象中那么强大,因为大部分人驾乘最常见的场景就是城市出行,如果城市NOH能落地,成为每天都用得上的高频功能时,在某种意义上,城市NOH就真正改变了大家的用车方式。
魏牌城市NOH是造车老炮儿拿出来最前沿的智驾辅助技术,这是魏牌继DHT技术后的第二张技术牌。魏牌作为城市智能辅助第一梯队,伴随着未来在摩卡DHT-PHEV激光雷达版的交付,相信在不久后,我们会充分感受他的魅力。