
首先是目前的辅助驾驶是不能跨越车主驾驶权的。
比如最近闹得沸沸扬扬的特斯拉事件,车主说踩的刹车,特斯拉说车主踩的电门。

有些朋友说不谈有的没的,为啥辅助驾驶的自动刹车功能为啥没启用。
不是说遇到了行人和车辆,会主动刹车吗?
有懂一点汽车的朋友,说难道AEB有问题了,关键时刻不起制动作用,那不是特斯拉的AEB的问题吗?
AEB,英文全称叫做“Autonomous Emergency Braking”,自动紧急刹车系统。

AEB是一种汽车主动安全技术,原理为识别前方障碍,测出安全距离,在危险距离时开始制动。
在识别出来障碍物之后,确定危险距离,AEB就会用声音及震动来提醒驾驶员,驾驶员依旧没有反应的情况下,AEB强制主动进行刹车,有效保护汽车自身(驾乘人员)及“障碍物”的安全。
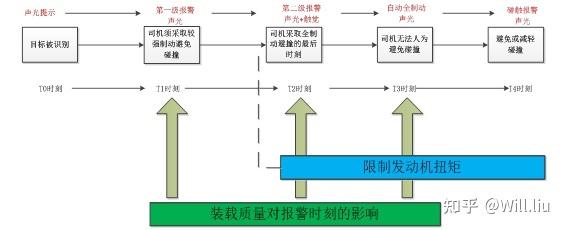
但是车主持续踩下油门/电门,加速意愿强烈的话,AEB是不会强制执行制动这个行为的,只是会进行声光/震动报警。
这里不用和我杠,我试过,AEB提醒我了,我执意踩的油门,最后还是加速追了尾,赔了几万块钱,还好买全了保险。
为什么这么设置,车辆在没有人为干预的情况下才会自动制动,因为目前的辅助驾驶是无法代替人的驾驶的。
如果AEB检测到了前车过快减速,想带脚刹减轻碰撞。而驾驶者的判断是旁边路是空的,可以转向避让的,反而踩油门/电门,打方向盘,加速驶离目前道路。如果AEB这个时候不听驾驶员的,硬要来脚急刹,反而可能造成事故。
再说,现阶段出了事故,比如车主开车撞了人,车没问题的话就是要找人了,不会去找辅助驾驶的责任。
这是因为谁是主要项目负责人,谁的声音就大,话语权就大。因为你(驾驶者)负责行车安全,别人(辅助驾驶)乱指挥,出了恶劣后果还你担责,那你肯依的啊?关键时刻,两者冲突,辅助驾驶还是要听驾驶员的。
所以,回到特斯拉事件,就应该知道为啥辅助安全无效了,只要电门深踩不放(或者系统因某种原因反馈车主需要持续加速),那么辅助的AEB等安全措施就不会强制启动,自然也不会看见人或者车减速了。
关于自动刹车的,普通人还有个盲点,就是为啥我有时候走神了,也没死踩油门啊,结果还是撞障碍物了,为啥汽车不能快撞障碍物了就自动刹车。
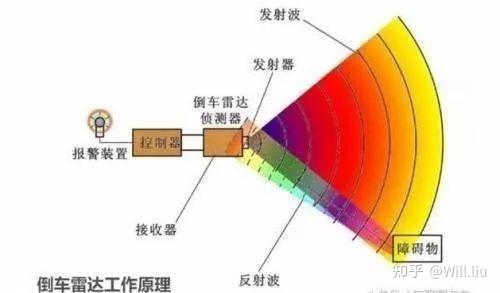
我原来倒车的时候,开着简配的车,没后置摄像头的那种,但车后面放箱子,放购物车,站着人,有堵墙,随便是啥,只要是车后面有障碍物,那个都报警。那技术不就是一个雷达,反射到了障碍物,然后雷达波回来告诉我有障碍物,管他什么障碍物,都不能倒了,随着障碍物距离接近不断报警(好一点的辅助驾驶还会刹停)啥的,有啥难度,要啥摄像头。
现在我开的车啥功能都有,自动泊车都出来了,在雷达和摄像头的帮助下,车辆都能直接入库了,而且遇到障碍物都会先判断,再预警,再自动调整位置避开障碍。

为啥车现在先进到这种程度了,感应器都能探测很远了,还是不能遇到障碍物就刹车呢。

那么,为什么汽车不能设计成行驶的时候快撞车就自动刹车呢?

这个解释起来,就稍微复杂了一点点。
先说下泊车的雷达。
用来泊车报警的感知设备,叫做超声波雷达。而这个雷达的目前最远探测距离(保持精度)为5米。
啥叫超声波雷达?
就是一个发射超声波的装置,再弄一个接收超声波的装置,根据来回的时间差,就能估算出雷达距离障碍物的相对距离,精度可以达到1-3CM。
现在我们常见的,也是用了几十年的超声波雷达叫UPA,UPA的探测距离一般在15CM-250CM。通常安装在汽车前后保险杠上,用于辅助泊车。
而自动泊车就需要装侧面雷达,这里用的则是更长距离的探测超声波雷达APA.APA的探测距离在30-500CM。
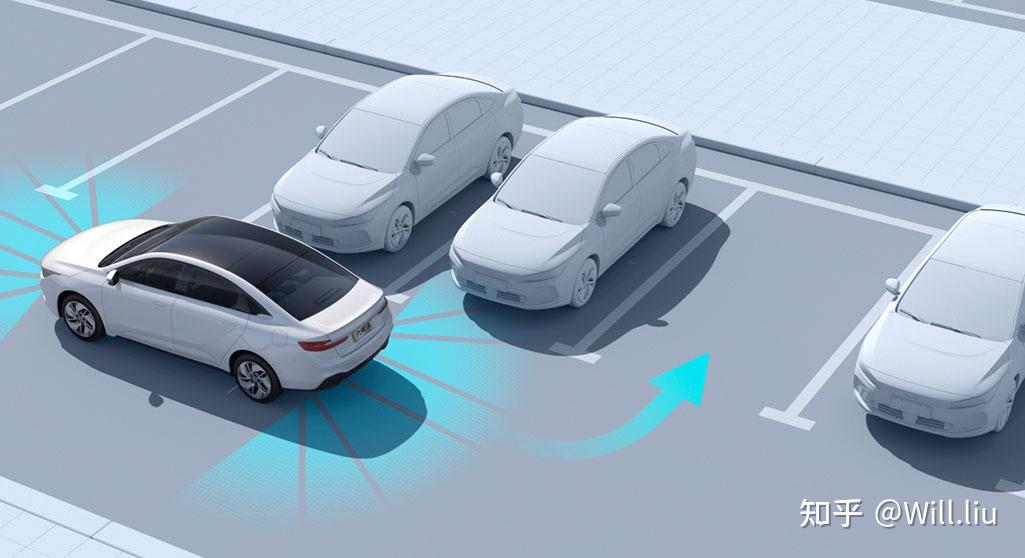
APA用于测量侧方障碍物的相对距离,因为其探测距离较远,也可用在驾驶的时候探测后方、侧面是否有来车过于靠近本车,可以用于侧后方来车报警。
一辆车从检测到障碍物到刹停,要经过感知-思考-决策的过程。而一辆100公里时速的车,一秒就是28米,指望5米感知距离的超声波雷达来帮助刹停,等探测到了再到刹停,那简直就是100%碰撞,对于驾乘人员的生命简直就是开玩笑。
那么为什么超声波雷达不能检测远一点的位置,比如100米开外?
因为超声波是机械波,散射角大,方向性不集中,无法精准描述障碍物位置,离障碍物距离越远灵敏度越差,现阶段5米以上就无法判断障碍物的精准相对距离。
那么毫米波雷达,加高清摄像头呢,能否在车辆进行中高速行驶,在车主发呆的时候,遇到障碍物就停呢?
答案也是不行的。
这又要解释下原理了。
毫米波雷达即便最近才开始配在某些高端车型上的77GHZ的,其精度也只有10-40CM级。
这是个什么意思呢?就是一个人,在毫米波雷达的感知里,可能就是由几个反射点到十几个反射点所组成。一辆比人大很多倍的面包车、卡车,倒是反射点多一些,可能会有一个大概的轮廓勾勒出来。
但从稀疏的几个反射点里面判断前方是个人还是个什么玩意,还要从一大堆反射点里把这几个点给摘出来,不和其他的反射点融为一体,对于算法来说,也是个让它头疼的事情,反正我看过毫米波雷达反射的点云图,我是弄不清楚左边这十几个点,右边那几个点是啥玩意的……
觉得反射点少了,想多来点那个反射点,那么我们调高毫米波雷达的灵敏度,降低探测阈值行不行呢?
也不行,此路不通。
因为毫米波雷达对金属敏感度高,极容易把小金属识别成超大的金属体。
而马路上的各类金属块,比如废弃易拉罐,孤零零的金属护栏,金属标志牌,真的金属干扰源太多。
在高灵敏度下,这就和照相一样,灵敏度越高,无用的噪点也会增多,这样就会造成大量的误判,导致“鬼影”,“虚影”的出现。

所以,毫米波雷达必须要找到一个平衡点,太灵敏了到处都是误判,那么就不能精度太高。
而精度不高,就更不能毫无保留地相信毫米波雷达了。如果回回采纳它的数据,那汽车很有可能在一马平川的道路上,突然就是一个急刹,因为毫米波雷达判断前方有个“障碍物”。然后司机一脚油门,继续走,过一下又是一个刹停……还是误判…………
这样的辅助制动估计会让司机和乘客抓狂……会让车企破产……
所以,为了防止汽车出现这种状况,现在的逻辑,毫米波雷达要求刹停的要求还得经过高清摄像头的确认把关才行,这样就可以防止毫米波雷达误判。
只有在两者判断一致的情况下,比如前面有辆车停了,毫米波雷达说前面有辆车,摄像头也说前面有辆车,那么AEB才会下决定开始刹车。当然,根据权重的不同,也可以调整为摄像头说前面有辆车,毫米波雷达懵的情况下,也可以开始刹车。
说回高清摄像头,通过提供高分辨率的图像,再把图片转为二维数据,然后进行图像匹配进行识别。前面这个到底是车辆,还是行人,还是电动车,摩托车,这种方式就是我们常说的神经网络学习得来的。
(神经网络是一种模拟大脑认知的机理,解决各种机器学习的应用任务,从海量的数据中进行深度学习。)
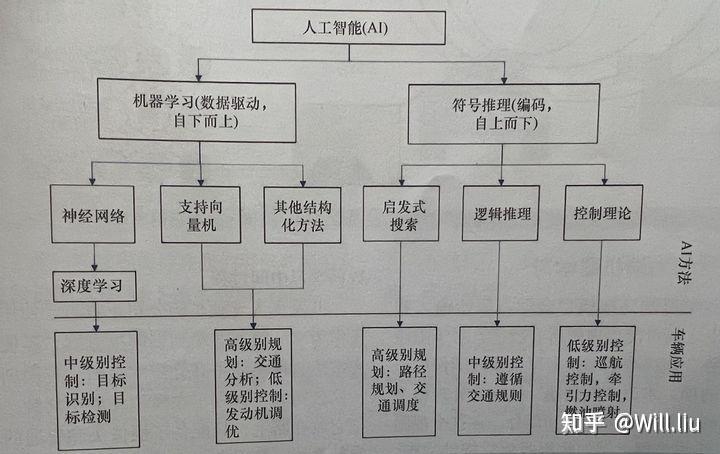
我们现在用的人工智能的学习,基本是采用的自下而上的方法,使用深度神经网络(DNN)或卷积神经网络(CNN)进行深度学习。(深度学习:一类机器学习算法,使用多层从原始输入中逐步提取更高层次的特征。)
而摄像头感知的数据,如果算法没有见过类似的,无法解析出来,很有可能认为这是个错误的感知。
比如前面道路,车的前方突然出现了一棵大树,还是枝繁叶茂的那种。

我们人眼当然知道,前面是一个装载一棵大树的大卡车,它停下来了,我不能再开了,否则就撞了。
但毫米波雷达示警,这前面的反射点告知车前面有个庞大的物体。但这反射点的轮廓,让雷达处于懵的状态,这到底是个啥?天边的一朵云彩?还是金属反射的虚影?不会又是出现了“鬼影”的误判吧。
摄像头拍摄后,也是懵的,这图片转成的二维数据俺没学过啊,俺在数据库里对比了好多次,完全和我之前学过的东西不沾边啊。
数据库没这样的汽车啊,也没这样的电动车和三轮车,也不像个人,更不像护栏,三角锥这类能出现在道路上的玩意,这到底是个神马东西。要说,翻了的车都导入数据库了,这翻了的车也不像啊。
算了,肯定是错误信息,摄像头过了坑抖动了,要不就是啥反光造成的幻觉?
然后两个探测器的数据汇总合计,行车电脑判定是错误感知,应该前面没障碍物,那就别辅助刹车了。
正常开吧,反正根据深度学习经验,之前这么判断了好多次了,都没出事,没问题的……
反正俺们也只是辅助,出责任的还是驾驶者,驾驶者都不急,俺们不知道啥原因,来个急刹也说不过去啊……

(图片来源网络,侵删!)